
Ali Nouri
AI Researcher @ Chalmers University of Technology
Arguing Safety of Autonomous Vehicle @ Volvo Cars
Research Goal:
Accelerating DevSafeOps for Autonomous Driving Software.
Collaboration between Volvo Cars, Zenseact, and Chalmers.
Recent Event: Public Defence
Topic: Accelerating the Design Phase -
Towards DevSafeOps for Autonomous Driving Software
Opponent: Prof. Philip Koopman, Carnegie Mellon University, US
Research Abstract
Background:
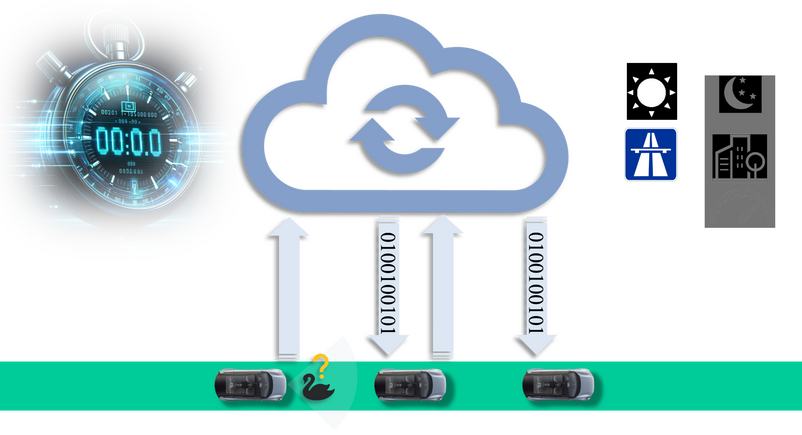
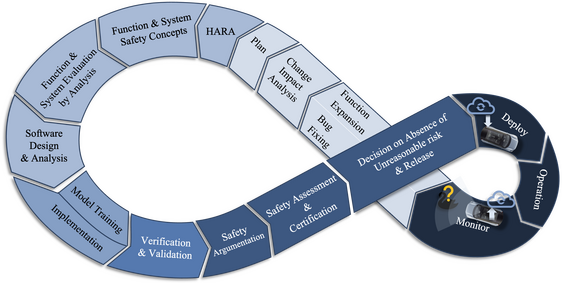
The safety of Autonomous Driving (AD) remains a barrier to its widespread adoption, as evidenced by recent incidents. Factors such as the complex environment, evolving technologies, and shifting regulatory and customer requirements necessitate continuous monitoring and improvement of AD software (Fig. 1). This is a process that may favor software and system engineering supported by DevOps. The iterative DevOps process is crucial, serving two purposes: satisfying customer demands through continuous improvement of the function and providing a framework for timely responses to unknown bugs or incidents.
")
Fig. 1: Autonomous Driving DevOps process (Publication A)
However, any update to the software must follow rigorous safety processes prescribed by standards, regulations, or the state of the art in industry. Incorporating these safety activities into the DevOps forms an iterative process called DevSafeOps. These necessary activities, although vital for safety assurance, inherently lead to a compromise in rapidity.
Research Goal:
In our research, we initially identify the challenges of rapid DevSafeOps in AD development, and then explore existing solutions. Subsequently, we propose multiple approaches for the acceleration of safety analysis, requirements engineering, code generation, and synthetic data generation in DevSafeOps cycles.
Methods:
To address each research objective, diverse research methods are utilized. Interview studies and a systematic literature review are conducted to identify the challenges, research gaps, and existing approaches. Then, design science, interview study, case study, and experimentation are employed.Results:
Initially, the challenges and research gaps related to each essential activity for the safety of automated driving are identified (Papers A and B), together with the proposed solutions presented in the literature (Paper B).
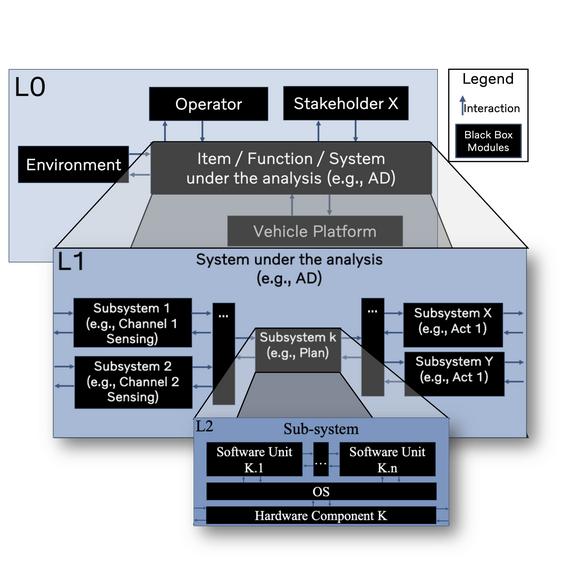
Then, two approaches are proposed to accelerate safety-concept design (i.e., analysis and requirements engineering) as an initial step in DevSafeOps. We adapt System Theoretic Process Analysis (STPA) to enable distributed development within automotive system engineering (Paper C).

Fig. 2: Distributed development (Publication C)
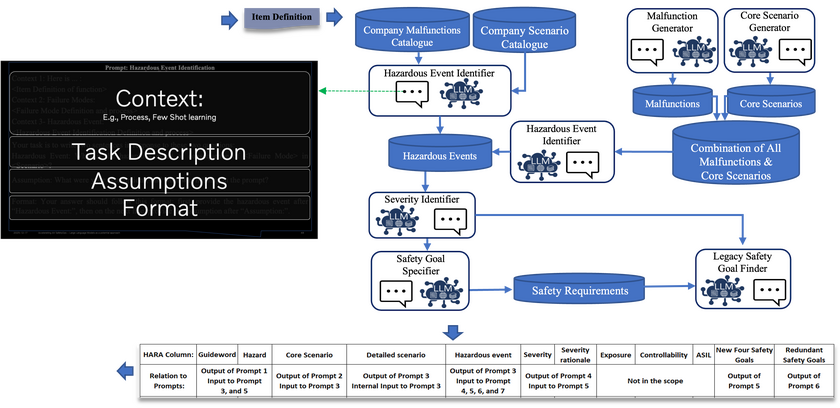
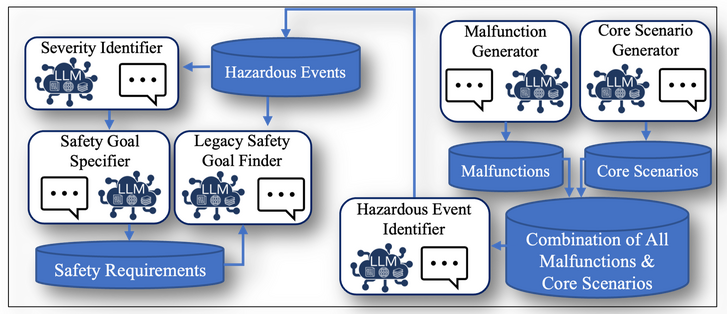
As an alternative approach, a large-language-model (LLM)-based multi-agent Hazard Analysis and Risk Assessment (HARA) prototype is developed and evaluated to enable automation (Papers D and E). LLM-based HARA (Fig. 3), utilizing a pipeline of subtasks, each managed through a specific prompt. The item definition is imported (top-left), and the HARA results are exported (bottom-right). In the second row of the HARA table, the relationship of each column to the prompts is summarized.

Fig. 3. LLM-based Multi-Agent HARA
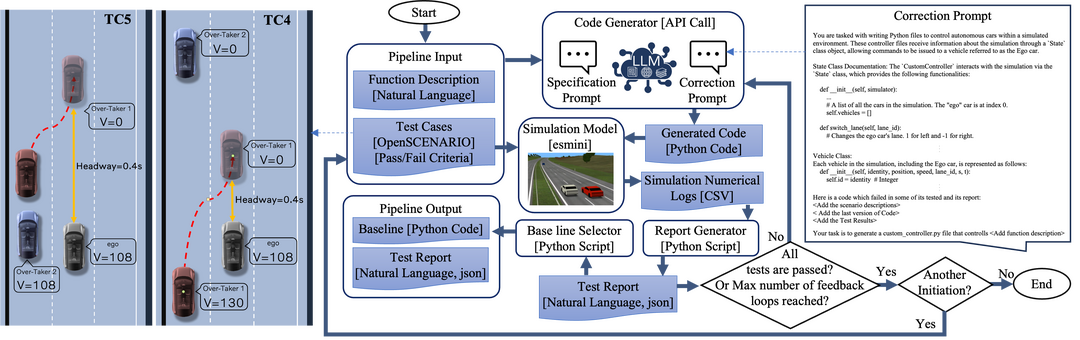
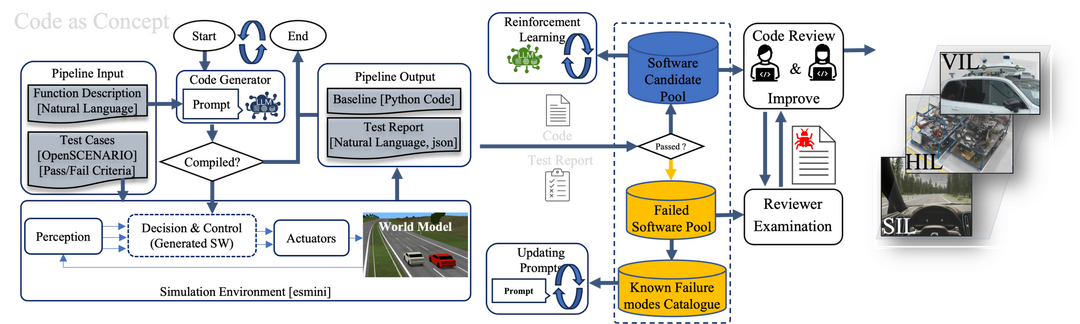
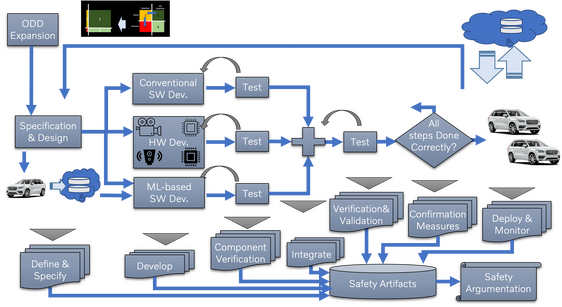
Then, the rule-based software-implementation phase is accelerated through LLM-based code generation conducted through a conversation in a simulation environment (Papers F and G). Initially, The LLM-generated code is evaluated automatically in a simulation model against multiple critical traffic scenarios, and an assessment report is provided as feedback to the LLM for modification or bug fixing. We report about the experimental results of the prototype employing Codellama:34b, DeepSeek (r1:32b and Coder:33b), CodeGemma:7b, Mistral:7b, and GPT4 for Adaptive Cruise Control (ACC) and Unsupervised Collision Avoidance by Evasive Manoeuvre (CAEM).
Current research:
Through synthetic-data generation using three-dimensional Gaussian Splatting (3DGS), the machine-learning (ML)-based software development in the DevSafeOps cycle is covered.
Conclusions:
My thesis first identifies multiple challenges in achieving rapid DevSafeOps in AD development and then proposes several approaches for addressing these challenges across different phases of the DevSafeOps cycle. To accelerate the design phase, we introduce an adaptation of STPA for multiparty distributed development and employ multi-agent LLMs as a parallel approach for HARA. We further examine how LLMs and VLMs can support safety concept design, code generation, and monitoring activities with reduced engineer involvement, while defining the necessary safeguarding measures. Finally, we investigate 3DGS as an effective and rapid DataOps technique within DevSafeOps, enabling improved data generation and augmentation for ML-based software development.
Recent Award
CHALLENGE AWARD IN RE '24: "Expanding the Frontiers of RE"
Recent Publications
A. Nouri, J. Andersson, K. D. J. Hornig, Z. Fei, E. Knabe, H. Sivencrona, B. Cabrero-Daniel, C. Berger
EASE 2025, 29th International Conference on Evaluation and Assessment in Software Engineering.
A. Nouri, B. Cabrero-Daniel, Z. Fei, K. Ronanki, H. Sivencrona, C. Berger
4th International Conference on Computer Safety, Reliability, and Security. SAFECOMP 2025. Lecture Notes in Computer Science, vol 15954. Springer, Cham.
A. Nouri, B. Cabrero-Daniel, F. Torner, C. Berger
Journal of Systems and Software, Volume 230, 2025, 112555, ISSN 0164-1212.
A. Nouri, B. Cabrero-Daniel, F. Torner, H. Sivencrona, C. Berger
2024 IEEE 32nd International Requirements Engineering Conference (RE), Reykjavik, Iceland, 2024, pp. 218-228.
A. Nouri, B. Cabrero-Daniel, F. Torner, C. Berger
IEEE/ACM 3rd International Conference on AI Engineering - Software Engineering for AI (CAIN '24). Association for Computing Machinery, New York, NY, USA, 172–177.
J. Gu, B. Cabrero-Daniel, A. Nouri, L. Armini, C. Berger
48th IEEE/ACM International Conference on Software Engineering (ICSE), 2026.
A. Nouri, C. Berger, F. Torner
2022 48th Euromicro Conference on Software Engineering and Advanced Applications (SEAA), Gran Canaria, Spain, 2022, pp. 358-365.
T. Bouraffa, E. Kjellberg Carlson, E. Wessman, A. Nouri, P. Lamart, C. Berger
2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC), Edmonton, AB, Canada, 2024, pp. 199-206.
B. Cabrero-Daniel, Y. Fazelidehkordi, A. Nouri
In: Nguyen-Duc, A., Abrahamsson, P., Khomh, F. (eds) Generative AI for Effective Software Development. Springer, Cham.
A. Nouri, C. Berger, F. Torner
2023 49th Euromicro Conference on Software Engineering and Advanced Applications (SEAA), Durres, Albania, 2023, pp. 5-12.
M. R. Martínez Rodríguez, A. Nouri, Z. Fei & M. M. Hedblom
PRIMA 2025: Principles and Practice of Multi-Agent Systems. PRIMA 2025. Lecture Notes in Computer Science(), vol 16366. Springer, Cham.
Patents (publicly available)
Upcoming Presentations
Selected Previous Presentations
- MIT 2022 STAMP Workshop - A feasibility study on the application of STPA method in AD
- Auto AI USA (San Francisco) - Accelerating AV DevSafeOps - Large Language Models as a potential approach
- Autonomous Vehicle Technology Expo 2024 - Leashing AI: On Challenges and Solutions in Autonomous Vehicle Safety Assurance
- CAIN 2024 - Welcome Your New AI Teammate: On Safety Analysis by Leashing Large Language Models
- Keynote @ SRToITS 2025 is in conjunction with SAFECOMP 2025 - DevSafeOps for Autonomous Driving: Generative AI
Guest Lecture
| Title (@ Course) | University |
|---|---|
| Generative AI as a Software Architect (@ Software Engineering) | Chalmers University of Technology |
| LLM-enabled Software Engineering (@Constraint Programming and Practical Optimization) | Chalmers University of Technology |
| Autonomous Vehicles and the critical role of requirements engineering (@ Requirements Engineering) | University of Gothenburg |
Supervision Activities
| Title (Link) | Year |
|---|---|
| Master’s thesis (Current): End-to-End VLA Model for Autonomous Driving | 2026 |
| Master’s thesis (Current): Synthetic data generation for DataOps for Autonomous Driving | 2026 |
| Master’s thesis (Current): self-supervised learning for Autonomous Driving | 2026 |
| Master’s thesis (Current): Scalable DataOps for Autonomous Driving | 2026 |
| Master’s thesis (Current): MLLM-enabled DataOps for Autonomous Driving | 2026 |
| Master’s thesis: Synthetic Data Generation for Vision and LiDAR-Based Object Detection | 2025 |
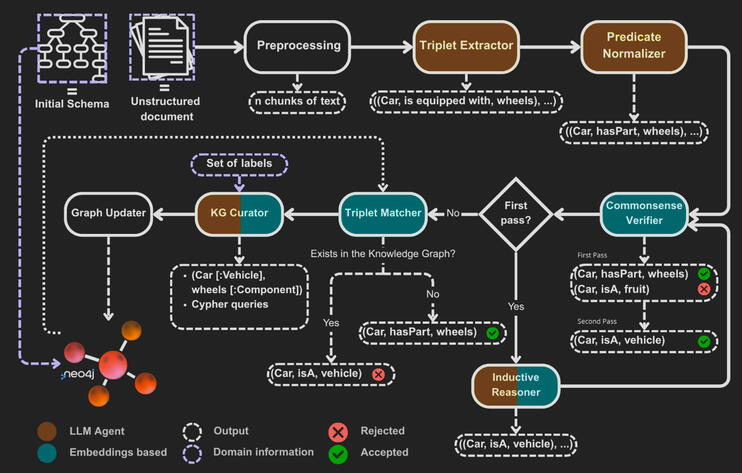
| Master’s thesis: From Text to Trust: An LLM Multi-Agent System with Embedding Verification for ADAS Knowledge Graph Construction | 2025 |
| Master’s thesis: FINE-TUNING LLM FOR SCENARIO GENERATION FOR ADAS SYSTEMS | 2025 |
| Master’s thesis: Multi-Agent Large Language Model as AD/ADAS System Engineer. | 2025 |
| Master’s thesis: Autonomous Pipeline for Generating Vehicle Behavior Logic, Leveraging Generative AI and Simulation | 2024 |
| Master’s thesis: Space-Filling Curve-Based Traffic Event Detection Using Deep Learning and Optical Flow | 2024 |
| Master’s thesis: Comparison of STPA with FMEA for analyzing safety of autonomous driving system | 2023 |
Experiences
2022 - Current: Autonomous Vehicle Researcher (PhD Candidate) @ Chalmers University of Technology & Volvo Cars
2018 - Current: Autonomous Vehicle Senior System Safety Engineer @ Volvo Cars
2015 - 2018: Safety Manager @ exida
Education
2022 - current: PhD candidate @ Chalmers University of Technology
2014 - 2015: Master Thesis @ ETH Zurich - Dynamic Capability Analysis and Arm Controller Development for an In-Situ Fabricator
Without stability control
With stability control
2012 - 2015: Master of Science in Mechatronics, Robotics, and Automation Engineering @ Politecnico di Torino